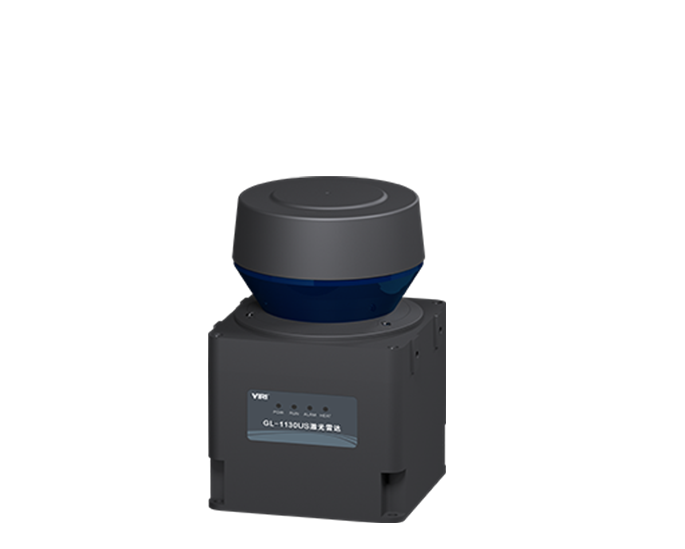
GL-1130US
GL-1230CM
GL-1230HS
GL-1320
GL-5310
GL-70200
GL-K15HE
GL-K40HE
GL-K30HS
GL-K60HS
GL-K100HS
GL-9430
GL-9460
GL-94100
GL-9120A
GLA-TK30HS/W
GLA-T70200/W
GLA-TK30HS/WM
GLA-T70200/WM
GQJK-1
GRZF-4
GPBF-2
GRZF-10B
Hot search | GL-K30HS GL-1230HS GL-9430 GL-9460 LiDAR
Stable performance
Small size
Light weight
Hot selling celebrity products